This is a part 2 in my WWVB time signal series (part 1, part 3).
After I essentially reproduced TxTempus project in PCB format, I thought to myself - what if I remove Raspberry Pi portion and get it working over USB?

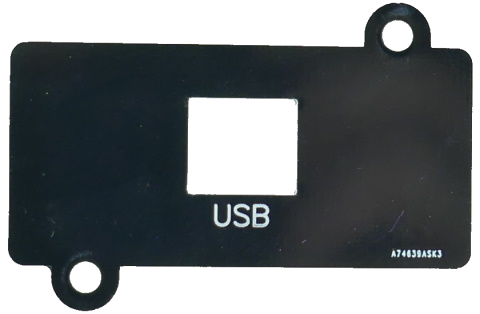
Choosing the enclosure was the easiest part. I saw this project fitting perfectly in Hammond 1593DBK. Its long format gives me enough space for antenna while its shape just calls for a watch to be placed around it. Even better, if I cannot get the original, there is an extremely similar HP-3653-B from Bud Industries.
Mind you, they are not exactly the same. For example, one has screws on the top while other has them on the bottom. Bud has just a smidgen shorter length. Even the shape of the panel is slightly different. So you cannot really just get PCB designed to fit Hammond directly into the other. However, if you are aware of those things, you can abuse tolerances a bit and design both board and panels that fit either case without any noticeable difference.
At first I decided to have a 0.8mm PCB so my favorite type-C can be easily soldered. PCBWay generously offered to get them to me for free. While this wasn’t the first time I ordered from them (and yes, I paid for boards more times than I got them free) it was the first time I used them for 0.8mm board.

They have a crazy amount of options and I keep changing my mind about how user-friendly this is. For some projects it makes sense to go over many options and fully customize everything but having all options on one page is slightly overwhelming and selecting the “wrong” option can really increase the price. If you don’t catch it immediately, it might be hard to figure out which option changed the price. Fortunately, both 1.6mm and 0.8mm are the same price. While some colors do involve extra cost, there is a fair selection of colors you can get for free. I went with green just because it ships faster.
For this project I didn’t go with any extra options and the only thing I missed was gold plating. While their HASL surface was leveled and I didn’t have any issues soldering 0.65mm SSOP components, the “golden” ENIG finish is nicer. However, $35 price increase for such finish seemed excessive and was not worth it for me.
When it comes to how the finished board looks, a basic green PCB is not a looker. While normal 1.6mm boards are a bit translucent, going to 0.8mm makes it excessively so. I cannot say I’m a fan of how it ended up looking and I would go with any other color (love the blue they have), even if it means a few days more.
Also worth it, is the removal of an internal product number PCBWay places on their boards unless you pay the extra $3. The placement itself was unobtrusive and sensibly done (way better than a few years before) but I am not sure if it was due to the care or pure coincidence. Even so, I think not having that number should be the default (and free).
My board didn’t push any limits (8/8 mils) so I didn’t really expect any issues. And I must say I saw none. The quality was good with traces looking really even. Based on just that I can bet their process is quite better than 6/6 they offered as a default. Either way, hand soldering 0.65mm SSOP was not troublesome at all. Not only traces and their solder masks were perfectly aligned but also surface didn’t have any serious leveling issues. I did notice there were some leveling artefacts (more on those later) but they seemed to be purely visual.
Interestingly, something went wrong with board sizes once I uploaded gerbers and my board suddenly became smaller as the order was placed. Their support did notice the same and we managed to sort it out but it caused a small delay. And yes, it was repeatable as board I ordered some time later (non-sponsored) had the exactly same issue. It might have been that their parser had issues with my DipTrace gerbers but I didn’t notice anything suspicious in them.
In any case, the boards arrived quickly. Some might say too quickly as I was still waiting for my microcontroller of choice - PIC16F1454. And I waited. And waited. Yep, I got hit by a chip shortage. But eventually Microchip came through (yes, I had to order directly from them) and the chips were in my hand.
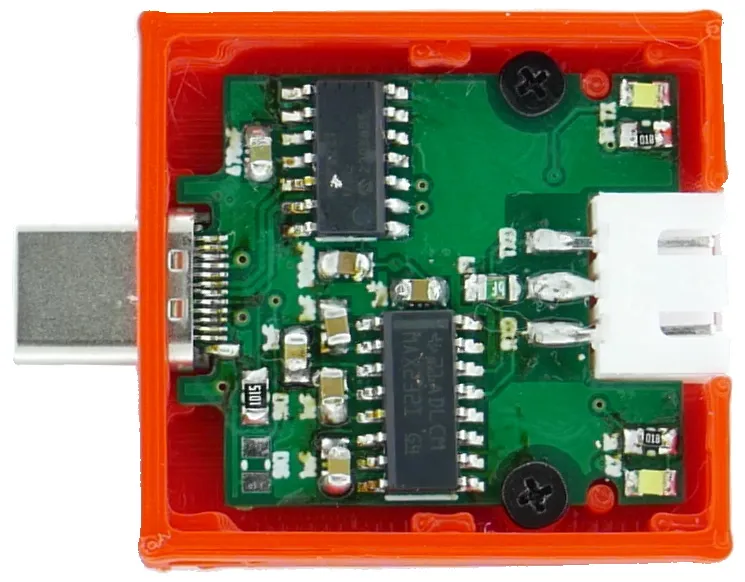
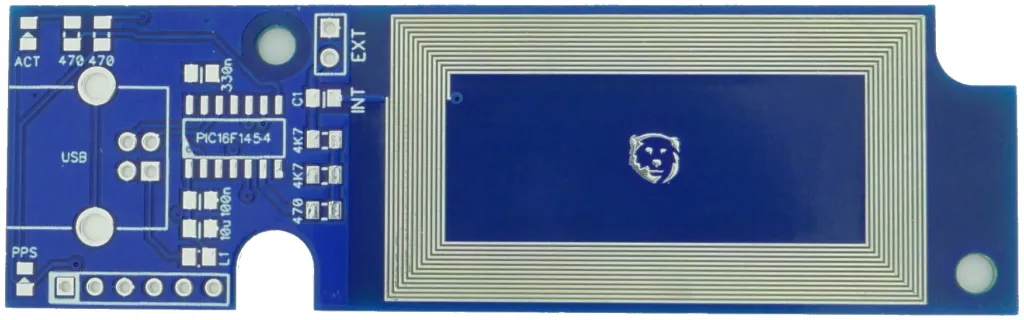
PCB design itself was reasonably simple and only about a fifth of board was used by components. The heart was already mentioned 16F1454 with an USB connector on one side and an antenna output on another. And I simply love this microcontroller.
If you want to make a serial USB device, it’s hard to get it easier than this. The only extra components you need for everything to work are two capacitors; one for general decoupling and one for the built-in USB module regulator. No external crystal, voltage regulator, nor USB pull-ups. That leaves fair 9 pins for general I/O.
Considering I just needed USB communication (D+ and D- pins), PWM module to generate 60 kHz, one output to modulate antenna signal, and another to blink a LED, even this microcontroller was more powerful than needed. However, if I needed some other features (e.g. ADC), its pin-compatible brethren - 16F1455 and 16F1459 - would allow for some growth before going to a completely different device.
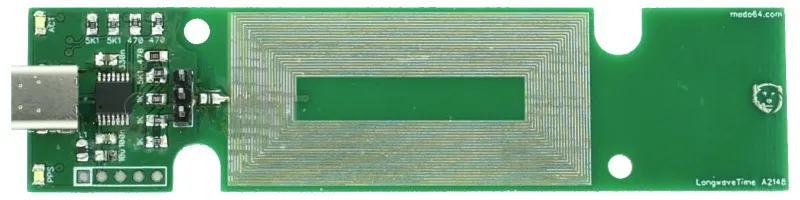
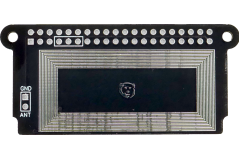
The most notable board feature is, of course, its rectangular PCB antenna. First of all you should understand that realistically you cannot create a good 60 kHz antenna on a PCB. For such a low frequency you need a LOT of wire and this PCB is way too small to fit so many loops. Even if I could fit all these loops, a PCB is not a friendly environment for it. Not only putting wire loops in a close proximity will make an inductor but it will also make a capacitor and a decent resistor.
Even if you cajole inductance and capacitance to get it to resonate at a right frequency, the amount of resistance all those trace loops have would force us to use a proper antenna driving circuit and not just a few resistors you see here. Even with all that, the imperfections in PCB process would make it impossible to retain all parameters from board to board as even the smallest trace change would throw it out of whack. And remember, we’re talking here about impractically big PCB to start with.
However, since I was intending to use this antenna in a close range, a lot of things don’t matter. Having such a huge mismatch actually helps with preventing signal going to far and messing with devices further away. It also doesn’t matter if antenna has solder mask removed or not. For this board I decided to go with solder mask removed but looks are literally the only reason for that decision. At 60 kHz this solder mask simply doesn’t change anything.

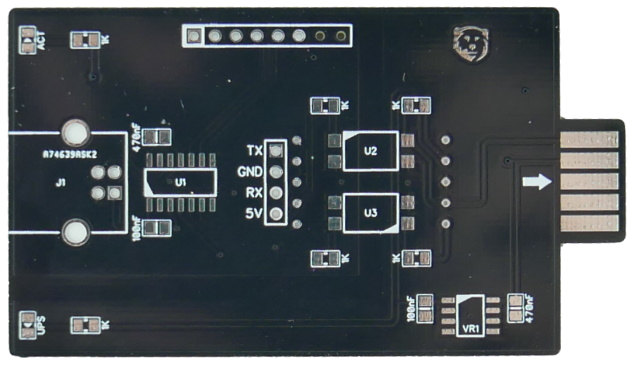
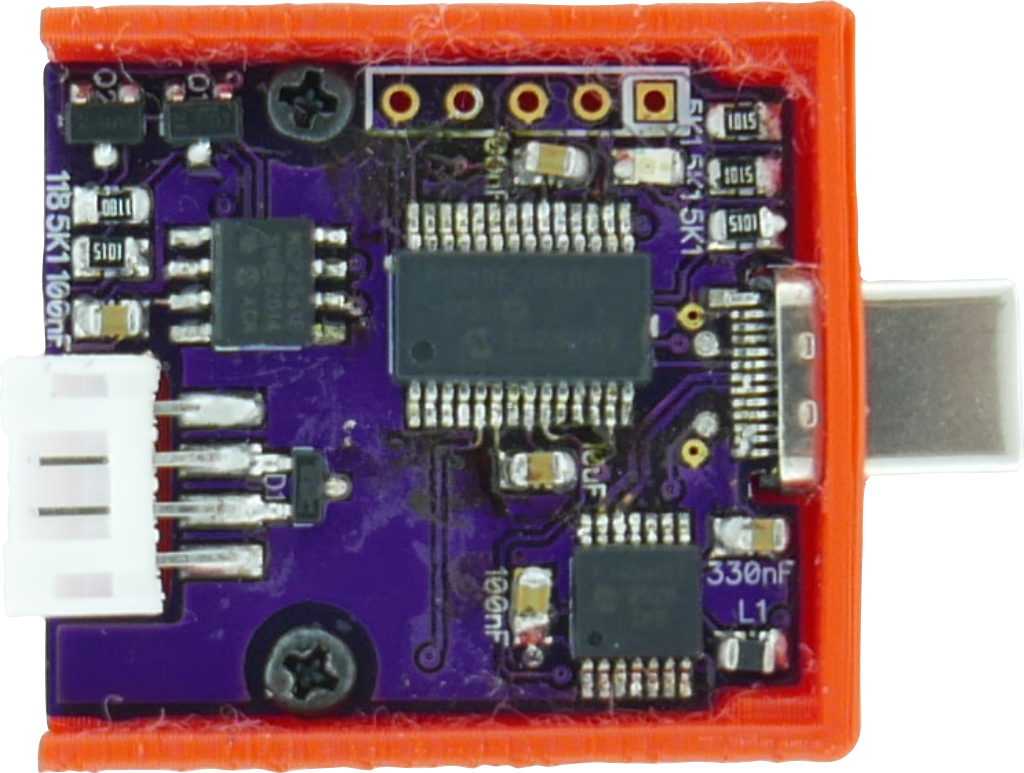
While waiting for components to arrive, I also decided to trim board a bit and make it easier to solder as not everybody likes SSOP and a type-C connector. This variant was a standard 1.6mm, slightly shorter in length, and with some components moved around a bit. And yes, I got it too from PCBWay but I paid for it with my own money . Regardless, the service I experienced was the same (including support for gerber size issue). The only change was a definitely nicer blue color - well worth extra few days of waiting if you ask me.
One extra thing I noticed about the blue board is that antenna looks much nicer and more leveled when compared to the green PCB. While the green board seemed leveled enough, on photos (or if you turn it slightly under the light), antenna has what looks as a “wave” across its surface. The blue board has the antenna surface looking much more leveled and without such artefacts.
I did check boards I previously ordered from PCBWay and I don’t see similar issues. My best guess is that their HASL leveling is not really optimized for 0.8mm boards and when you combine this with a slightly transparent (and thus less forgiving) green board you get visually worse result. Mind you, I only noticed it once I took photos under bright light so it’s really not a big deal.
In any case, with the board ready, it was time to do the firmware…
Please note I have received PCBs for this project for free from PCBWay and they are also the current sponsor of my website. They didn’t request anything specific for me to say and all opinions given here are mine and mine alone.