Note: If you are only interested in bit-rate calculator, skip to the bottom.
As you start designing CAN bus node around Microchip’s PIC microcontroller everything seems deceptively simple on the paper. Like with good old UART you only set for a node frequency and everything is fine and dandy. And then reality hits with various bit times and their “fuzzyness”. At times it might seem that there are a gazillion different ways it can be configured. How to decide?
There are four main parameters that determine all others. Obvious one is microcontroller’s frequency. You are pretty much required to use crystal because CAN bus tolerances and stability needs don’t allow for internal oscillator. My personal preference is using 12 MHz crystal as an oscillator source. 12 MHz allows quite high frequency (48 MHz with PLL) and it is quite commonly used for USB so you can share it (via REFO pin) with other devices on board (e.g., serial to USB converter).
Since all CAN nodes have to share the same baud rate, decision is made for you if the new node has to be integrated in the existing network. If you are designing your bus from scratch there is a whole slew of speeds you can select. I personally like to stick with CiA DS-102 defined speeds (10, 20, 50, 125, 250, 500, 800 and 1000 kbps). Higher baud rate allows for more messages/second but it works only at shorter distances and demands for better frequency stability. Lower baud rates allows for more distributed nodes and you might even get away with R/C oscillator source (at very low speeds). I use 125 kbps (500 meters max) as a starting point and deviate only if I really have to.
Maximum bus length is function of allowed signal delay. Higher the bitrate lower the distance and vice-versa. This parameter is basically our sanity checking mechanism and one of inputs when we calculate propagation segment duration.
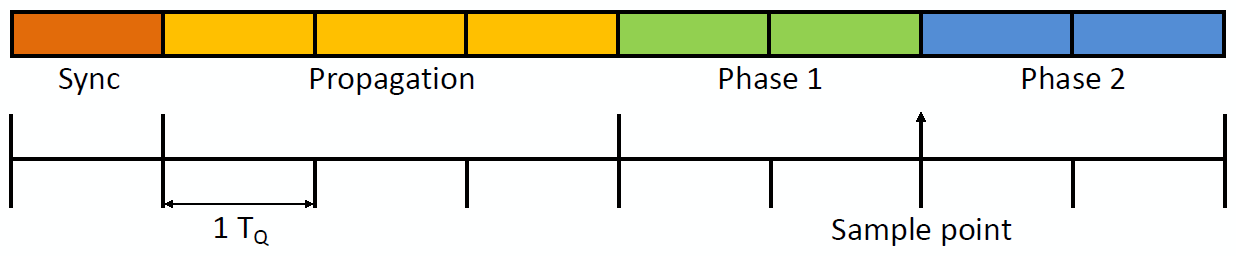
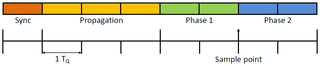
Time quanta (TQ for friends) is smallest time unit in CAN bus and it controls duration of a single bit. To represent a single bit, you need between 8 and 25 TQ. Those TQ units are further subdivided into synchronization segment (always 1 TQ), propagation segment (1-8 TQ), phase segment 1 (1-8 TQ) and phase segment 2 (1-8 TQ). Bigger the TQ, more control you have over fine bit tuning but at the cost of higher frequency need (i.e., 16 TQ subdivision will need double the frequency compared to 8 TQ to maintain same bit rate).
Synchronization segment always last for single quanta and CAN bus uses it internally to adjust bit edge. This ensures that various nodes don’t drift in time because of slight frequency differences. This is only segment with fixed duration.
Propagation segment that follows is there to compensate for a physical delay of the signal going over wire and its receival in driver. Rule of the thumb is that its value gets bigger with physical distance.
Phase segment 1 tells us duration (in TQ) before bit is actually sampled from line. Higher value you have, later sampling will occur. Actual sampling happens after sync + propagation + phase 1 quanta. More often than not, you want this time to be as close to the full quanta as possible.
Phase segment 2 is last segment and its duration concludes full bit time. It is very useful to keep this at at least 2 TQ because otherwise your sample point might get too close to edge of next bit.
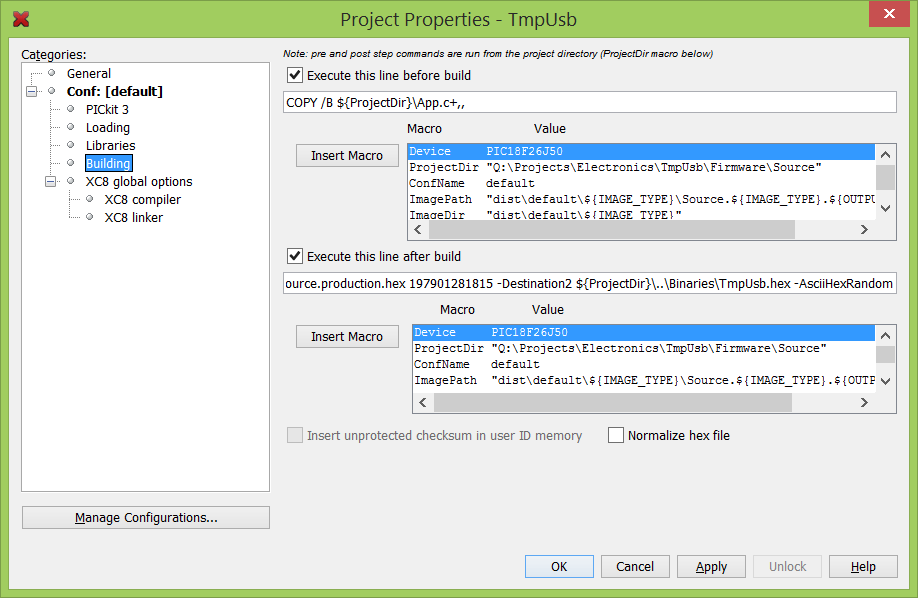
First programming parameter that PIC will actually use is the baud rate prescaler (BRP). Based on it we determine bit rate according to following formula BRP = FREQUENCY / (2 * TQ * BITRATE). This value than gives you actual TQ time (TQTIME = 2 * (BRP + 1) / FREQUENCY). From that you can get duration of a single bit (TBITTIME = TQ * TQTIME). Since BRP value can only be integer, to get nominal bit rate PIC we use another calculation BITRATE = 1 / TBITTIME. If everything goes alright actual bit rate will match desired bit rate. If such thing does not happen, a bit of input parameter tweaking might be beneficial.
I prefer to calculate phase 1 duration next. General rule is to have it last as long as possible. Half of total bit duration is as good approximation as any. Of course, maximum of 8 TQ.
Propagation segment length gets calculated based on desired physical bus. I use standard 5 ns/m figure for bus delay and I add 250 ns as worst case processing delay in transceiver and use that as a minimum value. If TQ is higher propagation delay must be increased regardless of actual physical distance because of phase 1 and phase 2 having maximum of 8 TQ.
Phase 2 gets calculated from whatever is left after sync, propagation and phase 1 segment get their share.
Synchronization jump width is fuzziest of them all. In theory it would help you if clock drifts between nodes. However, make it too big and PIC starts detecting sync bits where there are none. I usually go with half of propagation length as a starting point and then I adjust it not to be longer than either phase 1 or phase 2. This gives a bit of wiggling space for clocks to drift but it is not overly aggressive.
Below is a small form which actually does these calculations. Might come in handy.
PS: Some additional information that might be useful: